Квадрокоптеры Autel EVO IIgged Bundle V3 (102001738) - инструкция пользователя по применению, эксплуатации и установке на русском языке. Мы надеемся, она поможет вам решить возникшие у вас вопросы при эксплуатации техники.
Если остались вопросы, задайте их в комментариях после инструкции.
"Загружаем инструкцию", означает, что нужно подождать пока файл загрузится и можно будет его читать онлайн. Некоторые инструкции очень большие и время их появления зависит от вашей скорости интернета.































33
˗
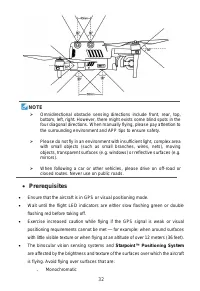
Highly reflective, such as water
˗
Especially dark or bright
˗
Subject to frequent lighting changes
˗
Made of closely repeating patterns, such as tiles
˗
Sound-absorbent, such as thick carpeting
˗
In motion, such as roads with heavy traffic
Keep the binocular camera lenses and sensors clean.
To avoid interference with the
Starp
oint™ Positioning System
, do not use 40
kHz ultrasonic devices, such as ultrasonic rangefinders, fault detectors,
cleaners or welding machines.
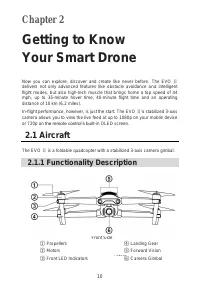
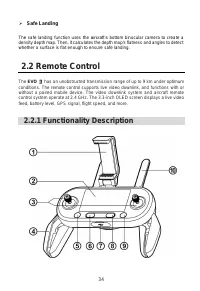
Functionality Description
Dynamic Tracking
Dynamic tracking uses deep learning algorithms to detect six types of subjects in
real time: pedestrian, cyclist, car, truck, boat, or animal. A real-time tracking
algorithm is used to automatically track the selected subject while avoiding
obstacles during flight. The function can track the subject in three modes. For more
information please refer to the APP Manual document.
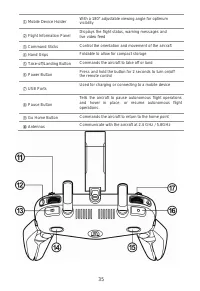
Viewpoint
Viewpoint allows the user to send the aircraft to a selected destination by touching
a point on the screen.
Gesture Commands
The main camera uses deep learning algorithms to recognize and respond to three
gesture commands: outstretch your arms to set yourself as a target, raise both arms
to capture a photo, and raise one arm to start or stop recording.
Accurate Landing
Accurate landing uses the
aircraft’s bottom binocular vision system to save a series
of images indicating the aircraft's altitude and yaw during takeoff. During the go-
home and landing process, the aircraft matches the altitude and yaw to the images
taken during takeoff, and calculates how far off the aircraft is from its takeoff location.
The aircraft is accurately controlled based on VIO feedback, and lands in its takeoff
position.
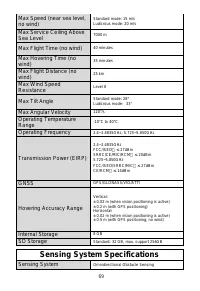
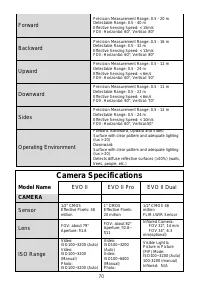
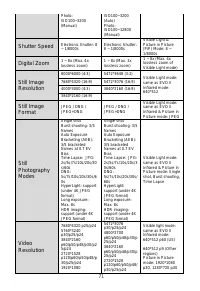
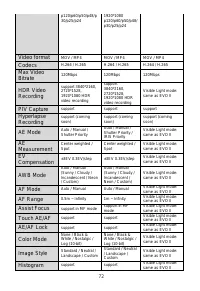
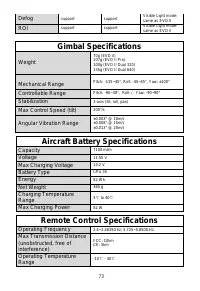
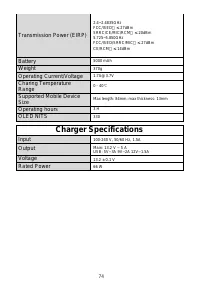
Характеристики

Остались вопросы?Не нашли свой ответ в руководстве или возникли другие проблемы? Задайте свой вопрос в форме ниже с подробным описанием вашей ситуации, чтобы другие люди и специалисты смогли дать на него ответ. Если вы знаете как решить проблему другого человека, пожалуйста, подскажите ему :)
