Квадрокоптеры Autel EVO IIgged Bundle V3 (102001738) - инструкция пользователя по применению, эксплуатации и установке на русском языке. Мы надеемся, она поможет вам решить возникшие у вас вопросы при эксплуатации техники.
Если остались вопросы, задайте их в комментариях после инструкции.
"Загружаем инструкцию", означает, что нужно подождать пока файл загрузится и можно будет его читать онлайн. Некоторые инструкции очень большие и время их появления зависит от вашей скорости интернета.






























30
NOTE
Landing Protection
and
Accurate Landing
can be enabled using the app.
Instructions for these functions are available in the
App Manual
.
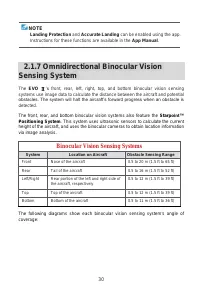
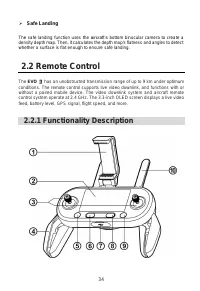
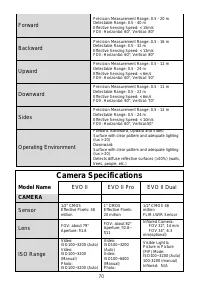
2.1.7 Omnidirectional Binocular Vision
Sensing System
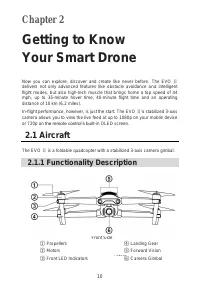
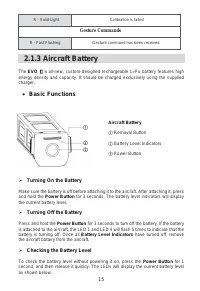
The
EVO
Ⅱ
’s front, rear, left, right, top, and bottom binocular vision sensing
systems use image data to calculate the distance between the aircraft and potential
obstacles. The system will halt the aircraft’s forward progress when an obstacle is
detected.
The front, rear, and bottom binocular vision systems also feature the
Starp
oint™
Positioning System
. This system uses ultrasonic sensors to calculate the current
height of the aircraft, and uses the binocular cameras to obtain location information
via image analysis.
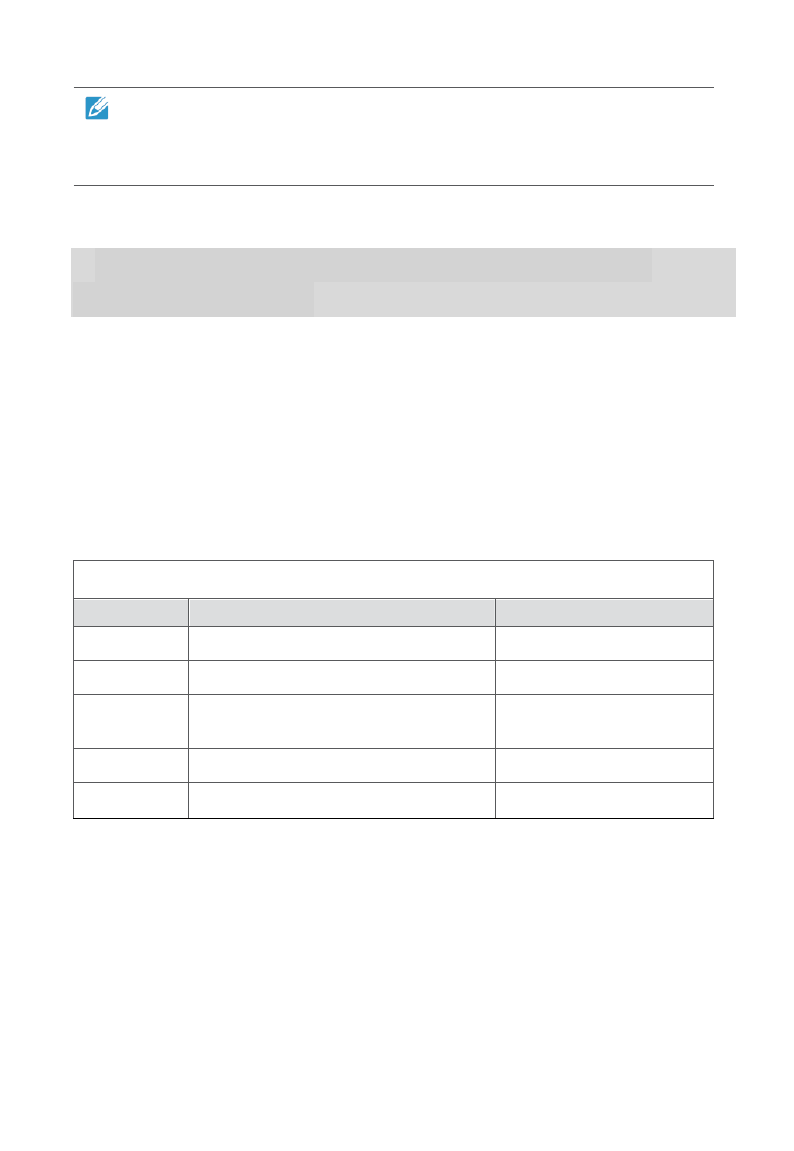
Binocular Vision Sensing Systems
System
Location on Aircraft
Obstacle Sensing Range
Front
Nose of the aircraft
0.5 to 20 m (1.5 ft to 65 ft)
Rear
Tail of the aircraft
0.5 to 16 m (1.5 ft to 52 ft)
Left/Right
Rear portion of the left and right side of
the aircraft, respectively
0.5 to 12 m (1.5 ft to 39 ft)
Top
Top of the aircraft
0.5 to 12 m (1.5 ft to 39 ft)
Bottom
Bottom of the aircraft
0.5 to 11 m (1.5 ft to 36 ft)
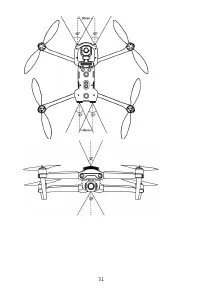
The following diagrams show each binocular vision sensing system's angle of
coverage:
Характеристики

Остались вопросы?Не нашли свой ответ в руководстве или возникли другие проблемы? Задайте свой вопрос в форме ниже с подробным описанием вашей ситуации, чтобы другие люди и специалисты смогли дать на него ответ. Если вы знаете как решить проблему другого человека, пожалуйста, подскажите ему :)
