Радар-детекторы Trendvision Drive 700 - инструкция пользователя по применению, эксплуатации и установке на русском языке. Мы надеемся, она поможет вам решить возникшие у вас вопросы при эксплуатации техники.
Если остались вопросы, задайте их в комментариях после инструкции.
"Загружаем инструкцию", означает, что нужно подождать пока файл загрузится и можно будет его читать онлайн. Некоторые инструкции очень большие и время их появления зависит от вашей скорости интернета.







12
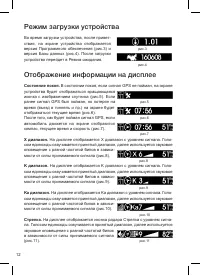
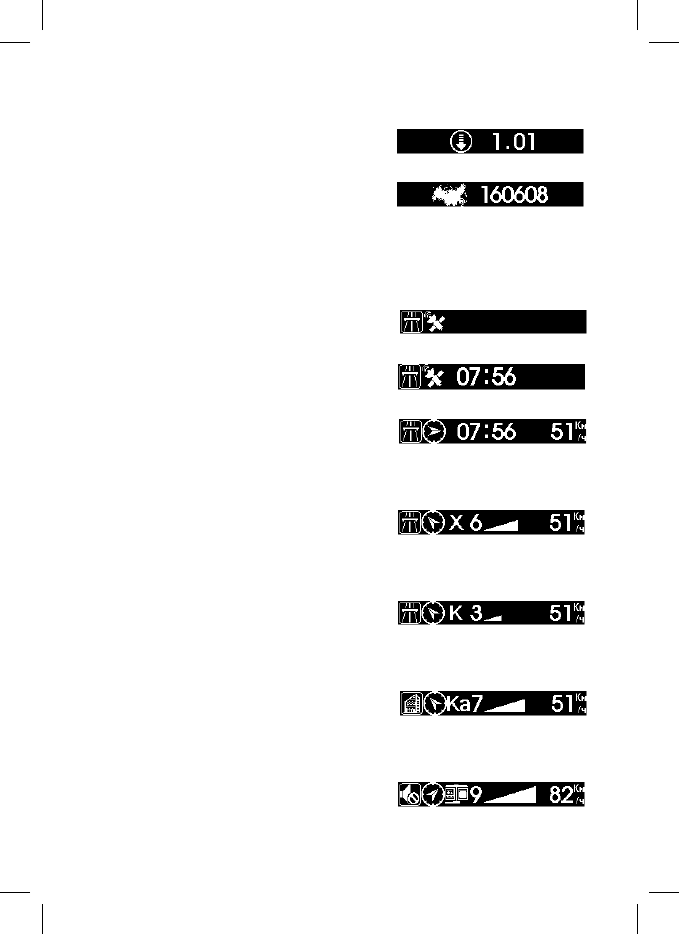
Режим загрузки устройства
Во время загрузки устройства, после привет-
ствия, на экране устройства отображается
версия Программного обеспечения (рис.3) и
версия Базы данных (рис.4). После загрузки
устройство перейдет в Режим ожидания.
Отображение информации на дисплее
Состояние покоя.
В состоянии покоя, если сигнал GPS не пойман, на экране
устройства будет отображаться вращающаяся
иконка с изображением спутника (рис.5). Если
ранее сигнал GPS был пойман, но потерян на
время (въезд в тоннель и пр.) на экране будет
отображаться текущее время (рис.6).
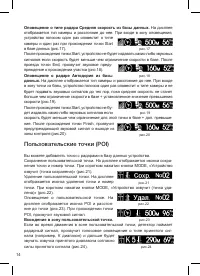
После того, как будет пойман сигнал GPS, если
автомобиль движется на экране отобразится
компас, текущее время и скорость (рис.7).
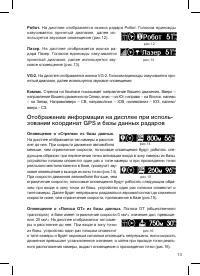
X диапазон.
На дисплее отображается X диапазон c уровнем сигнала. Голо-
сом единожды озвучивается принятый диапазон, далее используется звуковое
оповещение с разной частотой бипов в зависи-
мости от силы принимаемого сигнала (рис.8).
K диапазон.
На дисплее отображается K диапазон c уровнем сигнала. Голо-
сом единожды озвучивается принятый диапазон, далее используется звуковое
оповещение с разной частотой бипов в зависи-
мости от силы принимаемого сигнала (рис.9).
Ka диапазон.
На дисплее отображается Ka диапазон с уровнем сигнала. Голо-
сом единожды озвучивается принятый диапазон, далее используется звуковое
оповещение с разной частотой бипов в зависи-
мости от силы принимаемого сигнала (рис.10).
Стрелка.
На дисплее отображается иконка радара Стрелка c уровнем сигна-
ла. Голосом единожды озвучивается принятый диапазон, далее используется
звуковое оповещение с разной частотой бипов
в зависимости от силы принимаемого сигнала
(рис.11).
рис.11
рис.3
рис.4
рис.8
рис.9
рис.5
рис.6
рис.7
рис.10






